Mich trieb schon länger die Idee um, mir einen Copter zu bauen, der nicht so sperrig ist, wie mein Aquacopter. Mit 450 mm Diagonalabstand der Motoren ist der relativ ausladend. Klar, er wird etwas kleiner, wenn man die Propeller abnimmt, aber wer hat dazu schon immer Lust (ich nicht). So winzig wie diese Race-Copter sollte er für meine müden Augen aber auch nicht sein. Also etwas zum Zusammenklappen. Bis zur Umsetzung dauerte es dann aber doch noch recht lange. Die Idee gärte bestimmt zwei Jahre in mir.
Mich trieb schon länger die Idee um, mir einen Copter zu bauen, der nicht so sperrig ist, wie mein Aquacopter. Mit 450 mm Diagonalabstand der Motoren ist der relativ ausladend. Klar, er wird etwas kleiner, wenn man die Propeller abnimmt, aber wer hat dazu schon immer Lust (ich nicht). So winzig wie diese Race-Copter sollte er für meine müden Augen aber auch nicht sein. Also etwas zum Zusammenklappen. Bis zur Umsetzung dauerte es dann aber doch noch recht lange. Die Idee gärte bestimmt zwei Jahre in mir.
Vor ein paar Wochen legte ich dann los. Wie immer ™ sollte das ganze Werk natürlich nicht viel kosten. Motorabstand ca. 400 mm, Motoren kamen aus einer FPV-Racecopter-Gruppe bei Facebook, als Flightcontrol (also die Rechenplatine) fiel die Wahl auf eine Naze32, 25A-Motorregler, die damit zurechtkommen via Ebay. Die Auslegerstangen, Kohlefaserrohre, stammen von der 25-Jahres-Jubiläumsaktion zum Mauerfall in Berlin am 9.11.2014, der sog. Lichtgrenze. Ich hatte ein paar Aufpasser gefragt, was denn mit den alten Dingern passiert. „Eigentlich müssen die fachgerecht recycelt werden. Aber nimm‘ bloß mit. Was weg ist, ist weg.“ Und dann habe ich eben ein paar Kohlefaserrohre mitgenommen, die nun zu fliegendem Material geworden sind.

Als erstes musste mal die Klappmimik her. Als Arretierung dienen Schellen, in die man bei Aufputzelektroinstallationen die Kabelleerrohre klippt. An die Auslegerrohre habe ich quer dünnere Kohlefaserrohre geklebt (erst mit Sekundenkleber, dann mit 5-Minuten-Epoxy, nach dem zweiten Absturz mit Sekundenkleber und Kohlefaserrovings), durch die erst 6mm, nach dem zweiten Absturz 4mm-Nylonschrauben (als Sollbruchstellen – funktionierte mit 6mm eher so gar nicht) gesteckt werden.
Verschraubt ist das ganze mit einem Kreuz aus Aluminiumprofilen, die ich mit der sog. Reibetechnik mit Lötzinn verlötet habe. Nach dem zweiten Absturz habe ich das Kreuz dann allerdings aus Kunststoff-U-Profil noch einmal neu gebaut. Durch die Rohre konnte ich prima die Leitungen für die Motoren verlegen. Die werden dann aus dem Profil heraus zu den Motorreglern geführt. Im Bild am fertigen Copter zu sehen.

Als nächstes war der „Rumpf“ dran, also das Teil, das Akku und Elektronik aufnimmt. Dafür nehme ich gern so Bastelplatte aus dem Baumarkt (4 bis 5 mm dick), wohl ein festeres Schaumzeugs oder so, das man mit dem Teppichmesser schneiden kann (in mehreren Zügen). Das ist nicht superstabil, aber einigermaßen leicht und gut zu verarbeiten. Klar, Kohlefaserplatten wären schöner, aber dafür müsste erst mal eine CNC-Fräse her. Also Baumarktzeugs.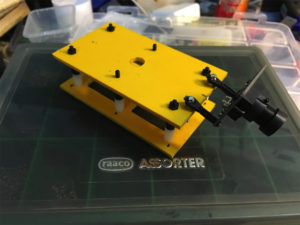
Mit Abstandhaltern sind zwei Platten parallel angeordnet, so dass die vorgesehenen Akkus (3s, 2400 mAh oder 2200 mAh) dazwischen passen. Hinten arretiert den Akku ein Gummiband, vorne wird er durch ein Blech vorm Rausrutschen gehindert, das gleichzeitig als Kühlkörper für den Videosender dient. Auf dem Bild sieht man schon eine kleine Kamera. Die soll später mal für FPV-Fliegen dienen. (First Person View, also Modellfliegen mit Video-Downlink und VR-Brille). So weit ist es aber noch nicht.
 Hier sieht man den Rohbau schon ganz gut. Die Motoren sitzen auf kleinen Kohlefaserplatten, die ich für kleines Geld bei Ebay gekauft habe (beinahe hätte ich „ersteigert“ geschrieben, aber das macht man ja praktisch nicht mehr).
Hier sieht man den Rohbau schon ganz gut. Die Motoren sitzen auf kleinen Kohlefaserplatten, die ich für kleines Geld bei Ebay gekauft habe (beinahe hätte ich „ersteigert“ geschrieben, aber das macht man ja praktisch nicht mehr).  Die Platten habe ich erst mit 5-Minuten-Epoxy angeklebt, was nur so mittelgut hielt. Jetzt mit Heißkleber und Kabelbindern. Geht.
Die Platten habe ich erst mit 5-Minuten-Epoxy angeklebt, was nur so mittelgut hielt. Jetzt mit Heißkleber und Kabelbindern. Geht.
Auf der oberen gelben Platte sitzen erst der Empfänger und darauf die Flightcontrol. Darauf läuft die „Cleanflight“-Software. Da kann man verdammt viel einstellen. Ich stehe gerade erst am Anfang der ganzen Parameterspielereien. Die ersten Flüge haben gezeigt, dass der Copter etwas schneller gieren könnte. Das werde ich wohl irgendwo verbessern können. Demnächst. 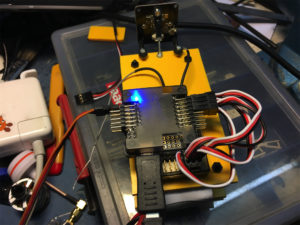
Tja, und nach dem Verteilen der Kanäle war der Copter dann erst mal so weit für die ersten Flüge fertig. Zusammengeklappt sieht das dann ganz kompakt aus, finde ich. Die ersten zwei Akkus habe ich gemütlich auf dem Sportplatz am alten Knast bei uns in Rummelsburg leergeflogen. Ging wunderbar! Als „Landegestell“ habe ich mit Magneten eine aufblasbare Ziffer „0“ unter dem Copter befestigt. Das federt schön, ist leicht und man kann die Fluglage gut erkennen. Sowas hängen sich Leute wohl ansonsten zu runden Geburtstagen mit einer weiteren Ziffer davor an die Tür oder in die Partylocation.
 Allerdings sollte noch eine LED-Bar ans Heck. Die könnte blinken, Bremslicht imitieren, Copter „scharf“ oder „gesichert“anzeigen (Motoren drehen beim Gasgeben oder eben nicht) und so Spielereien. Dafür muss der Empfänger der Flightcontrol aber statt eines PWM-Signals für jeden Kanal einzeln ein PPM-(Summen)-Signal liefern. Dafür hatte ich noch so einen kleinen Adapter rumliegen, der bislang problemlos seine Arbeit verrichtete. Also dran damit und die LEDs programmiert. Im Trockenlauf sah das alles super aus. Allerdings ist mir dann beim ersten richtigen Flug der Copter aus 2 m Höhe abgestürzt. Alle Motoren schlagartig auf „aus“, und das, obwohl „langsames Sinken“ mit 20 sec Motornachlauf als Fail Safe (keine sinnvollen Signale vom Empfänger) eingeschaltet war. An dem Adapter konnte es eigentlich nicht liegen. Also alle Kabel noch mal gecheckt, die geringen Schäden vom Absturz beseitigt und noch mal los. Die ersten paar Minuten ging wieder alles super.
Allerdings sollte noch eine LED-Bar ans Heck. Die könnte blinken, Bremslicht imitieren, Copter „scharf“ oder „gesichert“anzeigen (Motoren drehen beim Gasgeben oder eben nicht) und so Spielereien. Dafür muss der Empfänger der Flightcontrol aber statt eines PWM-Signals für jeden Kanal einzeln ein PPM-(Summen)-Signal liefern. Dafür hatte ich noch so einen kleinen Adapter rumliegen, der bislang problemlos seine Arbeit verrichtete. Also dran damit und die LEDs programmiert. Im Trockenlauf sah das alles super aus. Allerdings ist mir dann beim ersten richtigen Flug der Copter aus 2 m Höhe abgestürzt. Alle Motoren schlagartig auf „aus“, und das, obwohl „langsames Sinken“ mit 20 sec Motornachlauf als Fail Safe (keine sinnvollen Signale vom Empfänger) eingeschaltet war. An dem Adapter konnte es eigentlich nicht liegen. Also alle Kabel noch mal gecheckt, die geringen Schäden vom Absturz beseitigt und noch mal los. Die ersten paar Minuten ging wieder alles super.
Dann wieder plötzlich: Alle Motoren Stop. Schöner Mist, weil die Absturzhöhe nun geschätzt 10 Meter waren. Alle Ausleger abgebrochen (natürlich nicht an den dafür vorgesehenen Sollbruchstellen), Motoren lose, Kreuz verbogen und gerissen. Glücklicherweise war der Einschlag in einer Wiese. Das hält ja dann doch noch einiges ab. Also bin ich noch mal fast zurück auf „Los“ gegangen, (ohne 4000 Mark einzuziehen) und habe ein neues Kreuz gebaut, diesmal allerdings aus Kunststoff, weil das mit dem Löten doch zu nervig war und auch nicht so super hielt. Muss ich vielleicht noch mal üben. Die LED-Bar wieder demontiert, den PPM-Adapter weggelassen und alles wieder auf den Zustand zurückgebaut wie bei den ersten beiden Flügen.
 Tja, und siehe da: Alles super. Fliegt wirklich schön und ist dabei so kompakt, dass er bequem in einen kleinen Rucksack passt. Sieht halt nur bekloppt aus, der Klappkopter. Aber das ist bei meinen Fluggeräten ja nichts neues. Statt der LED-Bar habe ich nun ein paar dauerleuchtende LEDs in gelb und blau an das Kreuz geklebt. Ist dann auch ein bisschen bunt beim Fliegen. Und als nächstes beschäftige ich mich dann mal mit FPV-Fliegen. Wenn nicht ein Gyrocopter dazwischenkommt …
Tja, und siehe da: Alles super. Fliegt wirklich schön und ist dabei so kompakt, dass er bequem in einen kleinen Rucksack passt. Sieht halt nur bekloppt aus, der Klappkopter. Aber das ist bei meinen Fluggeräten ja nichts neues. Statt der LED-Bar habe ich nun ein paar dauerleuchtende LEDs in gelb und blau an das Kreuz geklebt. Ist dann auch ein bisschen bunt beim Fliegen. Und als nächstes beschäftige ich mich dann mal mit FPV-Fliegen. Wenn nicht ein Gyrocopter dazwischenkommt …