Wireless tethered drone – das non-flying object
Mittwoch, 27. September 2023 20:59
Ich hab mir da ja was überlegt. Ich möchte gern beruflich Drohnen als fliegende Kameras nutzen. Ich selbst habe schon vor vielen Jahren angefangen, damit zu expermentieren, als aj Kaufhausdrohnen noch gar nicht zu denken war. Erst habe ich die Dinger selber gebaut, dann fertige gekauft, weil die ruhiger fliegen und die eingebauten Kameras besser sind, als das, was ich mitfliegen lassen konnte.
Inzwischen ist es leider durch diverse Gesetzesänderungen und EU-Verordnungen so, dass man eigentlich nirgendwo mehr einfach so fliegen darf. Naja, „nirgendwo“ stimmt nicht. Aber da, wo es für mich interessant wird: In Städten, über Straßen und in Wohngebieten spricht praktisch immer etwas dagegen. Nähe zu Bundesstraßen, Autobahnen, Bahnanlagen, Kraftwerken, Krankenhäusern, Gefängnissen und überhaupt Flugverbotszonen: Vergiss es.
Schauen wir uns doch aber mal an, was zu Luftfahrzeugen im Gesetz steht:
(2) Luftfahrzeuge sind
- 1. Flugzeuge
- 2. Drehflügler
- 3. Luftschiffe
- 4. Segelflugzeuge
- 5. Motorsegler
- 6. Frei- und Fesselballone
- 7. (weggefallen)
- 8. Rettungsfallschirme
- 9. Flugmodelle
- 10. Luftsportgeräte
- 11. sonstige für die Benutzung des Luftraums bestimmte Geräte, sofern sie in Höhen von mehr als dreißig Metern über Grund oder Wasser betrieben werden können.
Raumfahrzeuge, Raketen und ähnliche Flugkörper gelten als Luftfahrzeuge, solange sie sich im Luftraum befinden. Ebenfalls als Luftfahrzeuge gelten unbemannte Fluggeräte einschließlich ihrer Kontrollstation, die nicht zu Zwecken des Sports oder der Freizeitgestaltung betrieben werden (unbemannte Luftfahrtsysteme)
Interessant ist Satz 11. Luftfahrzeuge sind also alle fliegenden Gerätschaften, die in Höhen von mehr als dreißig Metern betrieben werden können. Jedenfalls verstehe ich auch den zweiten Nachsatz „Ebenfalls als Luftfahrzeuge gelten unbemannte Fluggeräte einschließlich ihrer Kontrollstation, die nicht zu Zwecken des Sports oder der Freizeitgestaltung betrieben werden (unbemannte Luftfahrtsysteme)“ unter dieser Prämisse. 30 m. Hm. Lass mich mal ins Unreine denken:
Wenn ich an einen 3 m hohen Fesselballon ein Band von 25 Meter Länge mache und das Band in 2 Meter Höhe über Grund festhalte, ist es kein Luftfahrzeug. Recke ich mich noch ein bisschen mehr, so dass ich die 30 Meter überschreite, ist es ein Luftfahrzeug.
Wenn ich an meine Drohne ein am Erdboden befestigtes Band anbringe, das 30 m lang ist, und die Drohne aufsteigen lasse, ist sie kein Luftfahrzeug. Ist das Band länger, kann ich es gleich weglassen, denn dann ist es ein Luftfahrzeug. Es gibt tatsächlich Drohnen mit „Bändern“ (tethered drones). Die Verbindung ist aber für dauerhafte Stromversorgung gedacht, damit die Dinger einfach mehr oder weniger unbegrenzt fliegen können, nicht um Gesetze auszureizen.
Drohnen von z. B. DJI wissen mit ihren Sensoren sehr genau, in welcher Höhe über Grund sie fliegen. Das wird einem im Display auf dem angeschlossenen Smartphone angezeigt. Und man kann die Flughöhe in der Software vorgeben. Ich kann sagen: Drohne, flieg nicht höher als 30 m, und dann macht die das nicht. Sie „kann“ nicht höher als 30 m fliegen, genau wie der Ballon mit mechanischer Verbindung. Spielt es nun eine Rolle, ob die Begrenzung mechanisch oder software-technisch eingebaut ist?
Mein altes Motorrad hatte ein Leistungsdrosselung, damit man sie mit einer bestimmten Fahrerlaubnis fahren darf. Mit wenigen Handgriffen kann man die Drossel ausbauen. Schon reicht die ggf. vorhandene Erlaubnis nicht mehr. Am Auto sind Winterreifen angebracht, mit denen man „nur“ 180 km/h fahren darf. Tatsächlich kann das Auto aber schneller fahren. Modernen Fahrzeugen kann man vorgeben, dass bei Überschreitung von 180 km/h ein Licht aufblinkt. Fährt man schneller, erlischt die Betriebserlaubnis.
Ich habe schon ein paar Leute gefragt. Die sagen, meine Idee sei Unsinn. Du darfst nicht fliegen, wenn deine Drohne theoretisch höher fliegen kann. Ich bringe dann das Beispiel mit dem Fesselballon. Oder mit dem Drachen an der Leine. Was wäre das für ein Fluggerät, das technisch nicht in der Lage ist, höher als 30 m zu fliegen? Ein Fußball? Wenn man ordentlich treten kann, bekommt man den vielleicht auch über 30 m. Man muss sich vielleicht anstrengen oder sogar ein Katapult benutzen. Aber der Ball als solcher kann höher fliegen. Eigentlich ginge nur eine Art Rakete, die nur so viel Antriebsleistung hat, dass sie maximal die potentielle Energie aufbringen kann, die für die Lageänderung von 30 m nötig ist. Naja. Oder man zieht in den Denkprozess eben auch zusätzliche technische Beschränkungsmaßnahmen ein, womit wir bei der „wireless tethered drone“ sind. Sie ist dann kein Luftfahrzeug mehr. Ein fliegendes Ding, das nicht fliegt. Das non-flying object. Welcome wtd nfo. Dazu hätte ich ja gern mal die Meinung eines Fachanwalts für Luftrecht fragen:
- Ist der Satz mit den 30 Metern so zu verstehen, dass Geräte – egal ob manntragend oder nicht – grundsätzlich erst dann Luftfahrzeuge sind, wenn sie höher als 30 m fliegen können?
- Ist die software-seitige Beschränkung ausreichend, um die Vorgabe „kann nicht höher als 30 m fliegen“ zu erfüllen?
Thema: Das Leben, das Universum und der ganze Rest, Fusselflieger, Is' doch wahr!, Wie getz?, zum Abheben | Kommentare deaktiviert für Wireless tethered drone – das non-flying object | Autor: Will Sagen











 Mich trieb schon länger die Idee um, mir einen Copter zu bauen, der nicht so sperrig ist, wie mein
Mich trieb schon länger die Idee um, mir einen Copter zu bauen, der nicht so sperrig ist, wie mein 


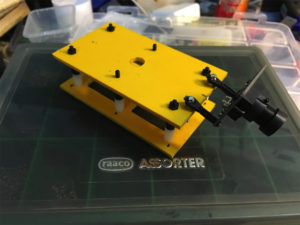
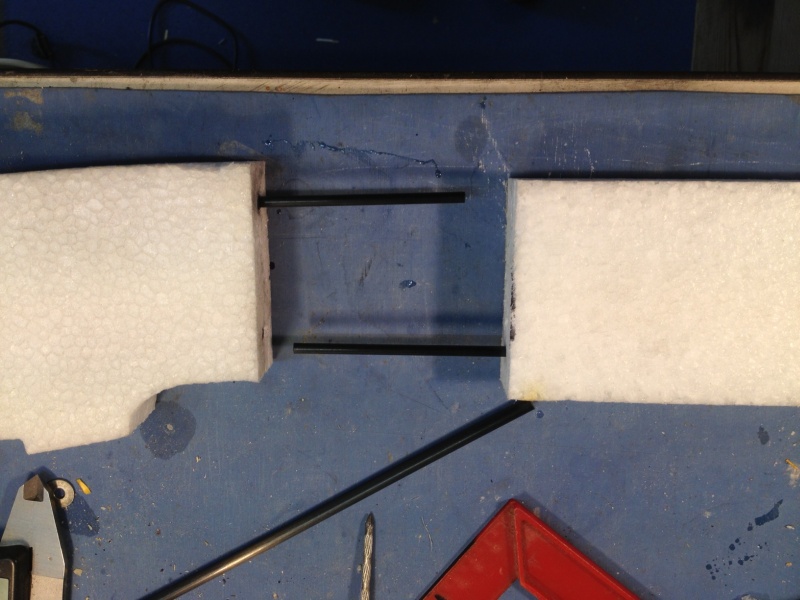
 Hier sieht man den Rohbau schon ganz gut. Die Motoren sitzen auf kleinen Kohlefaserplatten, die ich für kleines Geld bei Ebay gekauft habe (beinahe hätte ich „ersteigert“ geschrieben, aber das macht man ja praktisch nicht mehr).
Hier sieht man den Rohbau schon ganz gut. Die Motoren sitzen auf kleinen Kohlefaserplatten, die ich für kleines Geld bei Ebay gekauft habe (beinahe hätte ich „ersteigert“ geschrieben, aber das macht man ja praktisch nicht mehr).  Die Platten habe ich erst mit 5-Minuten-Epoxy angeklebt, was nur so mittelgut hielt. Jetzt mit Heißkleber und Kabelbindern. Geht.
Die Platten habe ich erst mit 5-Minuten-Epoxy angeklebt, was nur so mittelgut hielt. Jetzt mit Heißkleber und Kabelbindern. Geht.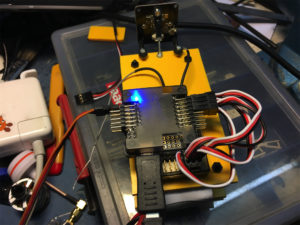
 Allerdings sollte noch eine LED-Bar ans Heck. Die könnte blinken, Bremslicht imitieren, Copter „scharf“ oder „gesichert“anzeigen (Motoren drehen beim Gasgeben oder eben nicht) und so Spielereien. Dafür muss der Empfänger der Flightcontrol aber statt eines PWM-Signals für jeden Kanal einzeln ein PPM-(Summen)-Signal liefern. Dafür hatte ich noch so einen kleinen Adapter rumliegen, der bislang problemlos seine Arbeit verrichtete. Also dran damit und die LEDs programmiert. Im Trockenlauf sah das alles super aus. Allerdings ist mir dann beim ersten richtigen Flug der Copter aus 2 m Höhe abgestürzt. Alle Motoren schlagartig auf „aus“, und das, obwohl „langsames Sinken“ mit 20 sec Motornachlauf als Fail Safe (keine sinnvollen Signale vom Empfänger) eingeschaltet war. An dem Adapter konnte es eigentlich nicht liegen. Also alle Kabel noch mal gecheckt, die geringen Schäden vom Absturz beseitigt und noch mal los. Die ersten paar Minuten ging wieder alles super.
Allerdings sollte noch eine LED-Bar ans Heck. Die könnte blinken, Bremslicht imitieren, Copter „scharf“ oder „gesichert“anzeigen (Motoren drehen beim Gasgeben oder eben nicht) und so Spielereien. Dafür muss der Empfänger der Flightcontrol aber statt eines PWM-Signals für jeden Kanal einzeln ein PPM-(Summen)-Signal liefern. Dafür hatte ich noch so einen kleinen Adapter rumliegen, der bislang problemlos seine Arbeit verrichtete. Also dran damit und die LEDs programmiert. Im Trockenlauf sah das alles super aus. Allerdings ist mir dann beim ersten richtigen Flug der Copter aus 2 m Höhe abgestürzt. Alle Motoren schlagartig auf „aus“, und das, obwohl „langsames Sinken“ mit 20 sec Motornachlauf als Fail Safe (keine sinnvollen Signale vom Empfänger) eingeschaltet war. An dem Adapter konnte es eigentlich nicht liegen. Also alle Kabel noch mal gecheckt, die geringen Schäden vom Absturz beseitigt und noch mal los. Die ersten paar Minuten ging wieder alles super.
 Tja, und siehe da: Alles super. Fliegt wirklich schön und ist dabei so kompakt, dass er bequem in einen kleinen Rucksack passt. Sieht halt nur bekloppt aus, der Klappkopter. Aber das ist bei meinen Fluggeräten ja nichts neues. Statt der LED-Bar habe ich nun ein paar dauerleuchtende LEDs in gelb und blau an das Kreuz geklebt. Ist dann auch ein bisschen bunt beim Fliegen. Und als nächstes beschäftige ich mich dann mal mit FPV-Fliegen. Wenn nicht ein Gyrocopter dazwischenkommt …
Tja, und siehe da: Alles super. Fliegt wirklich schön und ist dabei so kompakt, dass er bequem in einen kleinen Rucksack passt. Sieht halt nur bekloppt aus, der Klappkopter. Aber das ist bei meinen Fluggeräten ja nichts neues. Statt der LED-Bar habe ich nun ein paar dauerleuchtende LEDs in gelb und blau an das Kreuz geklebt. Ist dann auch ein bisschen bunt beim Fliegen. Und als nächstes beschäftige ich mich dann mal mit FPV-Fliegen. Wenn nicht ein Gyrocopter dazwischenkommt …



















 „Das fliegt ja nie!“
„Das fliegt ja nie!“